

Integration von EtherCAT, CANopen und CoE in industrielle Automatisierungsprojekte


Die Wahl des richtigen Kommunikationsprotokolls ist für den Erfolg von industriellen Automatisierungsprojekten von entscheidender Bedeutung. Der Auswahlprozess kann aufgrund der Vielzahl verfügbarer Protokolle, die jeweils einzigartige Vorteile, Kosten und Implementierungsprobleme aufweisen, eine Herausforderung darstellen. Die beliebtesten Protokolle sind EtherCAT und CANopen, die jeweils unterschiedliche Funktionen bieten, um spezifische Anwendungsanforderungen zu erfüllen.
Wenn Sie EtherCAT und CANopen verstehen, können Sie entscheiden, welches Protokoll für Ihre industrielle Automatisierungsanwendung am besten geeignet ist, wobei Faktoren wie Geschwindigkeit, Komplexität und Systemspezifika berücksichtigt werden.
Wir sind auf EtherCAT (CoE und andere Mutexe) und CANopen spezialisiert, um industrielle Automatisierungsprojekte voranzutreiben. Wir bieten Dienstleistungen in den Bereichen Schaltplanentwurf, Leiterplattenlayout und Firmware-Entwicklung an. Unser Team verfügt über die Erfahrung und das Fachwissen, um Ihr Projekt zum Leben zu erwecken, egal ob Sie Hochgeschwindigkeits-Echtzeitsysteme, CANopen-Geräte oder CoE-Netzwerkeffizienz benötigen.
EtherCAT
EtherCAT (Ethernet for control automation technology) wurde 2003 von Beckhoff Automation als leistungsstarkes feldbusbasiertes Ethernet-System eingeführt. Entwickelt, um die Echtzeitanforderungen der industriellen Automatisierung zu erfüllen, gewann EtherCAT aufgrund seiner außergewöhnlichen Geschwindigkeit und Effizienz schnell an Beliebtheit und hat sich zu einem der am weitesten verbreiteten Kommunikationsprotokolle im Bereich der industriellen Automatisierung entwickelt.
EtherCAT ist das Echtzeitnetzwerk, das derzeit in der industriellen Automatisierung eingesetzt wird und die geringstmögliche Fehlerquote bietet. Durch die Integration einer EtherCAT-SPS können Hersteller eine Echtzeitsteuerung und -synchronisierung aller angeschlossenen Geräte erreichen.
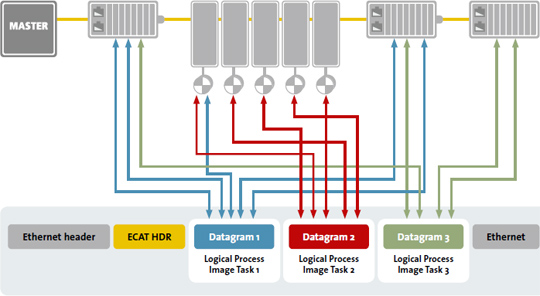
EtherCAT-Datenfluss. Quelle: ethercat.org
Unser Ingenieursteam entwickelt kundenspezifische SPS-Lösungen auf Basis von EtherCAT für industrielle Automatisierungsprojekte. Promwad ist Mitglied der EtherCAT-Gruppe und wir verwenden diesen Standard in Robotik-, Bewegungssteuerungs- und Verpackungssystemen, wo seine Fähigkeit, große Datenmengen mit minimaler Latenz zu verarbeiten, von entscheidend ist.
Wir verwenden verschiedene Hardware-Plattformen zur Unterstützung industrieller Netzwerklösungen, insbesondere EtherCAT-basierte Systeme, darunter Texas Instruments (AM335x, AM437x, AM57x, AMIC110, AMIC120, AM654x, AM64x) für robuste Verarbeitung und Echtzeitsteuerung sowie Infineon (XMC4300, XMC4800) für Hochleistungsanwendungen.
Unser Stack enthält außerdem Microchip (LAN9254, LAN9253, LAN9252) und ASIX Electronics (AX58400, AX58200) für kompakte, flexible Netzwerkschnittstellen sowie Beckhoffs ET1100 für nahtlose Kommunikation.
CANopen
CANopen (Controller Area Network Open) wurde in den 1990er Jahren von der Gruppe CAN in Automation (CiA) entwickelt und basiert auf dem CAN-Protokoll. Ursprünglich für Automobilanwendungen konzipiert, hat sich CANopen auch auf industrielle Anwendungen ausgeweitet.
CANopen baut auf dem CAN-Protokoll auf und bietet ein übergeordnetes Protokoll, das die Kommunikation, Konfiguration und den Datenaustausch zwischen Geräten verwaltet.
Bei Promwad sind wir darauf spezialisiert, auf CANopen basierende Lösungen an die Anforderungen Ihrer industriellen Automatisierungsprojekte anzupassen. Unsere Expertise erstreckt sich auf verschiedene CANopen-Anwendungsprofile, darunter die CiA 402-Serie für Antriebs- und Bewegungssteuerung, CiA 404 für Messgeräte und Regler, CiA 407 für Zugfahrzeugsteuerungssysteme und viele mehr.
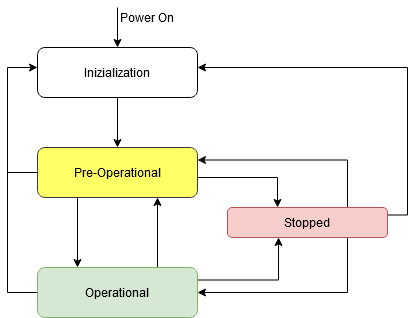
Das Diagramm einer CANopen-Gerätestatusmaschine. Quelle: codesys.com
CANopen ist für seine Flexibilität und Kosteneffizienz bekannt. Es unterstützt viele Geräteprofile und ist effizient, insbesondere in Umgebungen, die eine deterministische Kommunikation erfordern, aber hohe Datenraten sind nicht erforderlich.
Dieses Protokoll wird in der industriellen Automatisierung eingesetzt, insbesondere in kleineren Systemen, die nicht die Hochgeschwindigkeitsfähigkeiten von EtherCAT erfordern. Es ist auch in der Automobilindustrie, bei medizinischen Geräten, in der Gebäudeautomation und bei kleinen Industrieanlagen unverzichtbar.
CoE
Die Verwendung von CoE ermöglicht eine einfache Kommunikation zwischen CANopen- und EtherCAT-Geräten und schafft so ein einheitliches und effizientes Netzwerk. Die Geräte können ohne umfangreiche Änderungen oder Anpassungen zusammenarbeiten, wodurch sich die Implementierungszeit und -kosten reduzieren. Die Integration von EtherCAT in CANopen erhöht die Netzwerkleistung, insbesondere in komplexen Automatisierungssystemen.
CoE wird in der Regel in Umgebungen eingesetzt, in denen ältere CANopen- und neuere EtherCAT-Geräte nebeneinander existieren. In großen Fertigungsanlagen beispielsweise, in denen verschiedene Teile der Produktionslinie unterschiedliche Protokolle verwenden können, ermöglicht CoE eine effektive Kommunikation zwischen diesen Teilen.
Wie wählt man das richtige Protokoll aus?
Bei der Auswahl eines Protokolls sind folgende Punkte zu beachten:
- Anforderungen an die Anwendung
Bei der Auswahl eines Kommunikationsprotokolls für die industrielle Automatisierung müssen zunächst die spezifischen Anforderungen der Anwendung definiert werden: Echtzeit-Datenverarbeitung, Netzwerkgröße und Kommunikationsgeschwindigkeit.
Wenn die Anwendung eine Echtzeitsteuerung und präzise Synchronisierung erfordert, wie z. B. in der Robotik oder Bewegungssteuerung, ist EtherCAT in der Regel die beste Wahl. CANopen ist zwar zuverlässig, eignet sich aber besser für Anwendungen mit weniger strengen Echtzeitanforderungen.
- Netzwerkgröße
Die Größe des Netzwerks und die Anzahl der unterstützten Geräte können die Protokollauswahl beeinflussen. EtherCAT eignet sich hervorragend für große, komplexe Netzwerke, in denen mehrere Geräte schnell kommunizieren müssen. CANopen eignet sich besser für kleinere Netzwerke, bei denen Einfachheit und Kosteneffizienz im Vordergrund stehen. CoE ist ideal für mittlere bis große Netzwerke, die Skalierbarkeit ohne Leistungseinbußen erfordern.
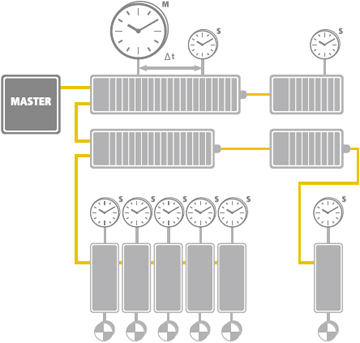
Taktsynchronisation in EtherCAT-Netzwerken. Quelle: ethercat.org
- Kommunikationsgeschwindigkeit
EtherCAT bietet beispiellose Kommunikationsgeschwindigkeiten, die sich perfekt für Anwendungen mit schnellem Datenaustausch eignen. CANopen ist langsamer, aber für viele Steuerungssysteme, insbesondere für Automobil- und eingebettete Systeme, ausreichend. CoE nutzt die Geschwindigkeit von EtherCAT und bleibt gleichzeitig mit CANopen kompatibel, sodass eine ausgewogene Lösung für Systeme geboten wird, die sowohl Geschwindigkeit als auch Flexibilität erfordern.
- Systemkomplexität
EtherCAT eignet sich am besten für komplexe Hochgeschwindigkeitssysteme, bei denen mehrere Geräte und Subsysteme in Echtzeit miteinander kommunizieren müssen. Es ist die perfekte Wahl für komplizierte Automatisierungsprozesse, wie sie in der Fertigung und Robotik vorkommen.
CANopen ist für einfachere, geradlinigere Systeme vorzuziehen, bei denen die Hauptziele Zuverlässigkeit und Kosteneffizienz sind. Es wird häufig in eingebetteten Systemen, Automobilanwendungen (sowohl CANopen als auch CAN) und kleineren industriellen Einrichtungen eingesetzt, bei denen die Systemkomplexität relativ gering ist.
CoE ist eine vielseitige Lösung für integrierte Systeme, die eine schnelle Kommunikation und eine einfache Geräteverwaltung erfordern. Dieses Protokoll ist besonders nützlich in Umgebungen, in denen vorhandene CANopen-Geräte in ein komplexeres EtherCAT-Netzwerk integriert werden müssen.
- Skalierbarkeit
EtherCAT ist hochgradig skalierbar, unterstützt viele Geräte und lässt sich leicht an Systemerweiterungen anpassen. Seine Flexibilität beim Netzwerkdesign macht es zu einer zukunftssicheren Wahl für groß angelegte industrielle Anwendungen.
CANopen und Controller Area Network in Anwendungen bieten Skalierbarkeit in kleinerem Maßstab und eignen sich für Anwendungen, die wahrscheinlich erweitert werden, aber nicht die umfangreichen Funktionen von EtherCAT erfordern. Sie eignen sich besonders gut für eingebettete Systeme und Automobilanwendungen, bei denen die Netzwerkgröße schrittweise zunehmen kann.

CANopen wird in der Automobilindustrie häufig verwendet, um die ECU mit anderen Komponenten wie Sensoren und Aktoren zu verbinden.
CoE bietet eine skalierbare Lösung, indem es die Integration von CANopen-Geräten in ein EtherCAT-Netzwerk ermöglicht. Dadurch kann ein System erweitert werden, ohne die vorhandene Infrastruktur vollständig zu überarbeiten.
Vergleich von Hardwarekosten und einfacher Implementierung
Bei der Auswahl des besten Protokolls für die industrielle Automatisierung ist es wichtig, die Hardwarekosten und die einfache Implementierung zu berücksichtigen, die sich auf das Gesamtbudget und den Projektzeitplan auswirken. Um Ihnen bei der richtigen Wahl zu helfen, haben wir die Hardwarekosten, Herausforderungen und Support-Besonderheiten jedes Protokolls verglichen.
- Kostenanalyse
EtherCAT erfordert in der Regel höhere Anfangskosten, da spezielle Netzwerkkarten, Controller und Switches benötigt werden. Die Anfangsinvestition in EtherCAT-Hardware ist zwar erheblich, aber die Unterstützung komplexer Hochgeschwindigkeitsnetzwerke zahlt sich langfristig aus. Mit der Zeit rechtfertigen die langfristigen Vorteile von EtherCAT, wie z. B. geringere Ausfallzeiten und verbesserte Leistung, oft die anfänglichen Ausgaben.
Andererseits ist CANopen aus Hardware-Sicht kostengünstiger. Es erfordert weniger teure Steuerungen und einfachere Netzwerkkomponenten und ist eine attraktive Option für kleinere Systeme und eingebettete Anwendungen.
Die erschwingliche CANopen-Hardware eignet sich für Projekte mit begrenzten Budgets oder für Projekte, bei denen eine Hochgeschwindigkeitsverbindung nicht entscheidend ist. Das CoE kann eine kostensparende Lösung für Projekte sein, bei denen eine vollständige Migration zu EtherCAT zu teuer wäre.
- Herausforderungen bei der Implementierung
EtherCAT ist für seine Komplexität bekannt, die einige Herausforderungen bei der Implementierung mit sich bringen kann. Aufgrund der steileren Lernkurve eignet sich EtherCAT für Organisationen, die Erfahrung im Umgang mit komplexen Automatisierungssystemen haben oder bereit sind, in umfassende Schulungen und Weiterbildungen zu investieren.
Im Gegensatz dazu ist CANopen viel einfacher zu implementieren. Seine unkomplizierte Architektur und die breite Verfügbarkeit kompatibler Hardware und Software erleichtern die Integration in bestehende Systeme. Die Einfachheit von CANopen reduziert den Zeit- und Arbeitsaufwand für die Implementierung und macht es zur besten Wahl für Projekte mit engen Fristen oder Teams mit wenig Erfahrung mit industriellen Kommunikationsprotokollen.

CoE ist nützlich in großen Industrieanlagen, Fabrikautomatisierung, Bewegungssteuerungssystemen und Robotik
CoE bietet eine Mischung aus der Einfachheit von CANopen und den fortschrittlichen Funktionen von EtherCAT. Die Integration von CANopen-Geräten in ein EtherCAT-Netzwerk kann zwar eine Herausforderung darstellen, ist jedoch im Allgemeinen weniger komplex als eine vollständige EtherCAT-Implementierung.
- Wartung und Support
EtherCAT erfordert aufgrund seiner Komplexität und der Notwendigkeit regelmäßiger Aktualisierungen von Netzwerkkonfigurationen, Firmware und Software im Allgemeinen eine intensivere Wartung. Der weit verbreitete Einsatz in industriellen Hochleistungsanwendungen bedeutet jedoch eine riesige Support-Community und eine Fülle von Ressourcen, die bei Wartungsproblemen helfen können.
Andererseits ist CANopen einfacher zu warten und hat geringere laufende Anforderungen. Einmal implementiert, erfordern CANopen-Systeme nur minimale Eingriffe, und die Suche nach Support und Ersatzteilen ist relativ unkompliziert, was sie zu einer zuverlässigen, wartungsarmen Option für den langfristigen Einsatz macht.
Die Integration und Wartung eines CoE-Netzwerks ist zwar möglicherweise aufwändiger als die eines eigenständigen CANopen-Systems, aber in der Regel weniger arbeitsintensiv als die Wartung eines vollständigen EtherCAT-Setups. Die kombinierte Unterstützung durch die EtherCAT- und CANopen-Community stellt sicher, dass CoE-Benutzer auf ein breites Spektrum an Wissen und Ressourcen zugreifen können.
Anwendungsfälle mit industriellen Protokollen
Verbesserung der Robotik mit EtherCAT
In einem aktuellen Projekt hat sich ein Roboterhersteller für EtherCAT entschieden, um die Kommunikationsgeschwindigkeit und -präzision seiner Industrieroboterarme zu erhöhen. Das Unternehmen hatte mit den Einschränkungen seiner bestehenden Kommunikationsprotokolle zu kämpfen, die Schwierigkeiten hatten, die für Hochgeschwindigkeitsvorgänge erforderliche Echtzeitsteuerung bereitzustellen. Diese mangelnde Reaktionsfähigkeit führte zu Ineffizienzen, insbesondere bei Aufgaben, die Präzision erfordern, wie z. B. Montage und Schweißen.
Der Hersteller reduzierte die Kommunikationslatenz durch die Integration von EtherCAT und ermöglichte so den Echtzeit-Datenaustausch zwischen den Robotersteuerungen und Sensoren. Diese Aufrüstung führte zu reibungsloseren, besser koordinierten Roboterbewegungen, was für die Genauigkeit bei Präzisionsaufgaben von entscheidender Bedeutung ist. Die Umstellung auf EtherCAT rationalisierte die Abläufe und ermöglichte eine höhere Effizienz bei zukünftigen Hochgeschwindigkeitsanwendungen.
CANopen-Implementierung in Schienenfahrzeugen
Ein Schienenfahrzeughersteller benötigte ein interoperables Kommunikationssystem, um proprietäre Protokolle zu ersetzen und verschiedene Subsysteme wie HLK, Türsteuerung und Fahrgastinformationssysteme effizient zu integrieren. CANopen wurde ausgewählt, um Steuergeräte im gesamten Zug zu verbinden. Durch die Implementierung von CANopen CiA 421, das für Schienenfahrzeuganwendungen entwickelt wurde, standardisierte das System die Kommunikation zwischen mehreren Subsystemen und stellte einen nahtlosen Datenaustausch sicher.

CANopen wird in Schienenfahrzeugen zur Verwaltung und Überwachung von Bremssystemen, Türsteuergeräten, HLK-Systemen und der Beleuchtung eingesetzt
Die Verwendung des CiA 421-Protokolls bot einen Rahmen für die Verwaltung komplexer Zugsteuerungsnetzwerke. Es optimierte die Kommunikation, reduzierte die Wartungskosten und verbesserte die Sicherheit und Leistung von Zügen. Das Protokoll ermöglichte auch eine einfachere Integration neuer Geräte und zukünftiger Upgrades.
CoE für die Integration in große Industrieanlagen
Ein großes Industrieunternehmen stand vor der Herausforderung, verschiedene Subsysteme zu integrieren, die auf unterschiedlichen Kommunikationsprotokollen basierten. Die Umgebung des Werks umfasste eine Mischung aus CANopen, EtherCAT und anderen proprietären Protokollen, was zu Schwierigkeiten bei der Echtzeitkommunikation und dem konsistenten Datenaustausch in der gesamten Anlage führte. Die bestehende Konfiguration war ineffizient, mit häufigen Übertragungsverzögerungen und mangelnder Synchronisierung zwischen kritischen Systemen.
Um diese Probleme zu lösen, führte das Werk CoE ein. Dadurch konnte das Werk die Einfachheit und Kosteneffizienz von CANopen mit der Hochgeschwindigkeitskommunikation und den Echtzeit-Datenverarbeitungsfunktionen von EtherCAT kombinieren. Dieser hybride Ansatz bot einen einheitlichen Kommunikationsrahmen für eine reibungslose Interaktion zwischen verschiedenen Subsystemen und die betriebliche Effizienz des Werks.
***
Die Wahl des richtigen Kommunikationsprotokolls ist entscheidend für die Optimierung der Leistung und Zuverlässigkeit industrieller Automatisierungssysteme. Sie können das Protokoll auswählen, das am besten zu Ihrem Projekt passt, indem Sie Faktoren wie Anwendungsanforderungen, Systemkomplexität und Kompatibilität sorgfältig abwägen.
EtherCAT, CANopen und CoE haben alle ihre Vorteile, und wenn Sie diese verstehen, können Sie eine fundierte Entscheidung treffen, die die Effizienz Ihrer Abläufe verbessert.
Promwad bietet maßgeschneiderte Lösungen, die den Industriestandards und spezifischen Projektzielen entsprechen. Ob Sie nun fachkundige Beratung zur Protokollauswahl, Unterstützung bei der Implementierung oder eine umfassende Systemintegration benötigen – unser Team steht Ihnen zur Seite.
Lassen Sie uns besprechen, wie wir Ihnen helfen können, die besten Ergebnisse für Ihre industriellen Automatisierungsprojekte zu erzielen!
Unsere Fallstudien zur industriellen Automatisierung




