

Humanoider Robotik-Bausatz: Vom Konzept zur Anwendung


Wir bei Promwad glauben, dass interne Forschung und Entwicklung nicht nur ein Spielplatz für Experimente ist, sondern eine strategische Investition, um die Entwicklung für unsere Kunden zu beschleunigen.
In diesem Artikel stellen wir Ihnen unseren humanoiden Robotik-Bausatz vor, den wir intern entwickelt haben, um die Entwicklung von Servicerobotern zu beschleunigen. Durch den Aufbau einer kompletten Prototyp-Plattform – vom mechanischen Layout bis zum Software-Stack – helfen wir unseren Partnern, die Markteinführungszeit zu verkürzen und die Entwicklung von Robotern in Branchen wie dem Gastgewerbe, der Lagerhaltung und dem Gesundheitswesen zu vereinfachen.
Mechanische Architektur und Kinematik
Die meisten Werkzeuge und Gegenstände in unserer Umgebung – Türgriffe, Schalter, Treppen, Bänke – sind für durchschnittlich große Erwachsene konstruiert. Damit ein humanoider Roboter sich in solchen Umgebungen natürlich bewegen kann, muss er den Bewegungsumfang und den Arbeitsbereich eines Menschen nachbilden und gleichzeitig mechanisch einfach zu fertigen und zu warten sein.
Wir haben ein anthropomorphes Design mit 22 steuerbaren Freiheitsgraden gewählt:
- Eine schwebende Beckenbasis, die als globaler Referenzrahmen dient
- Symmetrische 4-DOF-Arme für die Manipulation mit beiden Händen
- Symmetrische 5-DOF-Beine für dynamische Fortbewegung
- Ein 3-DOF-Kopf für die Wahrnehmung
- Ein 1-DOF-Lendenwirbelgelenk für die Verlagerung des Schwerpunkts beim Heben und Klettern
Diese Konfiguration minimiert Redundanzen und Gewicht und deckt gleichzeitig die für industrielle und häusliche Aufgaben erforderlichen Winkelbereiche ab.
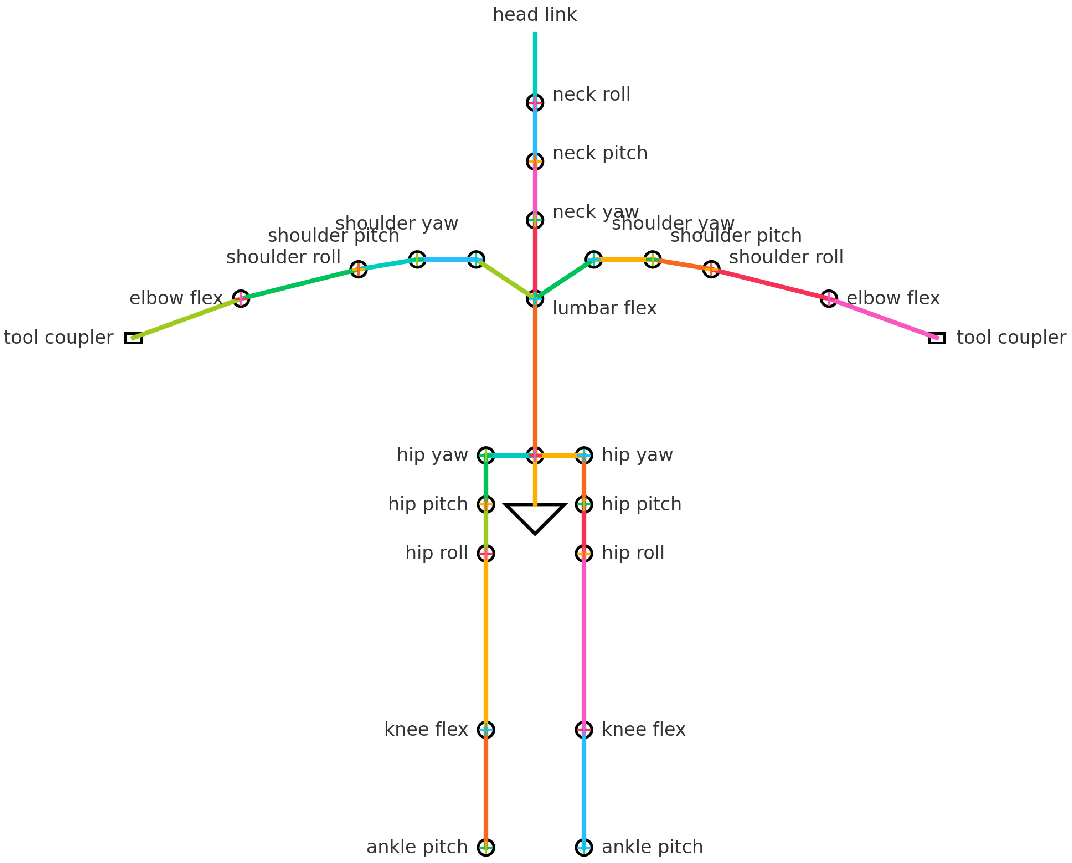
Kinematische Struktur des humanoiden Roboters: ein vereinfachtes Gelenkdiagramm mit 26 steuerbaren Freiheitsgraden, darunter symmetrische Arme und Beine, ein 3-DOF-Kopf und ein Lendenwirbelgelenk, das eine auf den Menschen zugeschnittene Ganzkörperbeweglichkeit ermöglicht.
Die inverse Dynamikanalyse (15 kg Nutzlast, 1,5 m/s Gehgeschwindigkeit) ergab Spitzendrehmomente von bis zu 210 N·m an den Hüften und Knien bei Gelenkgeschwindigkeiten von 10–13 rad/s. Nach Prüfung der verfügbaren drehmomentstarken Aktuatoren haben wir uns für den MyActuator X12-320 für alle angetriebenen Gelenke entschieden:
- Spitzen-/Dauerdrehmoment: 320/100 N·m
- Leerlaufdrehzahl: 125 U/min (≈13 rad/s) bei 48 V
- Übersetzungsverhältnis: 20:1, spielfrei
- Integrierter 16-Bit-Absolutwertgeber und Drehmomentsensor
- EtherCAT-Schnittstelle

Servoaktuator X12‑320 von MyActuator:Hochdrehmoment-Servo für alle Robotergelenke mit 320 N·m Spitzendrehmoment, integrierten Sensoren und EtherCAT-Schnittstelle – für eine einheitliche Antriebsarchitektur mit minimalem Verdrahtungsaufwand und maximaler mechanischer Effizienz. Bildquelle: myactuator.com
Durch die Verwendung eines einzigen Aktuatortyps konnten die Stückliste reduziert, das Wärmemanagement optimiert und die Ersatzteillogistik vereinfacht werden. In Gelenken wie Schultern, Hüften und Hals haben wir drei X12-240-Einheiten übereinander gestapelt. Andere Gelenke – Ellenbogen, Knie, Knöchel und Lendenwirbelsäule – werden von einzelnen Aktuatoren angetrieben. Hohlwellen leiten die 48-V-Gleichstrom- und Ethernet-Leitungen intern, wodurch externe Kabel entfallen. Die Aktuatorgehäuse sind direkt mit Aluminium-Titan-Verbindungsschalen verschraubt, die auch als Kühlkörper dienen. Finite-Elemente-Analysen bestätigten sichere Wicklungstemperaturen unter 65 °C bei einer Einschaltdauer von 40 %.
Mit dieser Architektur kann der Roboter:
- 25 kg vom Boden auf Hüfthöhe heben, mit 30 % Drehmomentreserve
- 5 km/h laufen
- Seitliche Stöße bis zu 250 N ohne Kniesättigung absorbieren
- Die Genauigkeit des Endeffektors bei einer Traglast von 10 kg innerhalb von ±1 mm RMS halten
Diese Ergebnisse bestätigen unser kinematisches Layout und die Wahl der Aktuatoren für robuste, menschenähnliche Manipulation und Mobilität.
End-Effektor-Design
Werkzeugwechsler
Um einen automatischen Wechsel zwischen Greifern zu ermöglichen, haben wir den Schnellwechsler Zimmer FWR („Manu-Matic“) integriert.
FWR ist ein vollständig mechanisches System. Wenn die Handgelenkplatte in die Parkstation gleitet, löst sich die federbelastete Verriegelung automatisch und rastet beim Zurückziehen wieder ein – ganz ohne Pneumatik oder 24-V-Aktuator. Dies ermöglicht einen nahtlosen Wechsel zwischen der anthropomorphen Hand und einem Dreifinger-Greifer unter Beibehaltung einer sauberen EtherCAT- und DC-Architektur.

Zimmer FWR Schnellwechselsystem:Mechanischer Werkzeugwechsler, der einen vollständig autonomen Endeffektorwechsel ohne Pneumatik oder externe Antriebe ermöglicht – für schnelle, ausfallsichere Übergänge zwischen den Werkzeugen bei gleichzeitig geringem Gewicht des Handgelenks und ausschließlicher Verwendung von EtherCAT. Bildquelle: zimmer-group.com
Für unsere Nutzlast von ≤25 kg verwenden wir das kompakte Modell FWR63, das eine Reserve von 30 kg bietet. Standard-WER-1500-Medienmodule, die auf der Wechslerstrecke montiert sind:
- EtherCAT oder GigE über RJ-45-/M12-D-kodierte Anschlüsse
- Gleichstromversorgung (max. 25 A) über 4- bis 12-polige Blöcke
- Optionale Pneumatik (bis zu 4 Leitungen)
Ein induktiver Sensor bestätigt das Andocken. Der FWR gewährleistet:
- Vollautonomer Werkzeugwechsel
- Einheitliche Kommunikations- und Stromführung
- Ausfallsichere mechanische Verriegelung auch bei Stromausfall
Dreifinger-Greifer
Dieser Greifer handhabt sperrige oder unregelmäßige Objekte, die für anthropomorphe Hände eine Herausforderung darstellen. Er verfügt über zwei Motoren – einen für die Drehung, einen für den Griff – sowie Dehnungsmessstreifen zur Messung von Kraft und Stabilität.
Elmo Gold Solo Guitar 25/60 A oder Ingenia ServoCore-Treiber sind im Sockel gestapelt, sodass ein einzelner EtherCAT-Knoten zum Handgelenkkabelbaum führt.

Elmo Gold Solo Guitar Servoantrieb:Kompakter EtherCAT-kompatibler Motorcontroller, der in der Basis des Dreifinger-Greifers verwendet wird und eine präzise Bewegungssteuerung in einer platzsparenden, leichten Bauweise ermöglicht. Bildquelle: elmomc.com
Jeder Finger nutzt den Fin Ray-Effekt – flexible, gerippte Flossen, die sich an die Form des Objekts anpassen, die Last verteilen und die Reibung beim Greifen erhöhen. Diese passive Anpassung erhöht die Haltekraft um 30–40 % gegenüber starren Backen.

Dreifinger-Fin-Ray-Greifer:Weicher, anpassungsfähiger Endeffektor mit gerippten, flexiblen Fingern, die sich an verschiedene Formen anpassen und so eine um 30–40 % höhere Haltekraft als starre Klemm-Backen erzielen, während sie gleichzeitig eine leichte, kabellose Struktur beibehalten. Bildquelle: sheen.co.za
Anthropomorpher Greifer
Wir haben den Roboter mit der SCHUNK SVH-Hand ausgestattet – einer Vorrichtung mit fünf Fingern, die eine menschliche Hand in Originalgröße nachahmt. Sie bietet 20 Freiheitsgrade, wird von 9 integrierten Motoren angetrieben, wiegt nur 1,3 kg und wird mit 24 V Gleichstrom betrieben.
Die gesamte Stromversorgung und die RS-485-Kommunikation sind im Handgelenk integriert. Die Montage an der Zimmer FWR-Platte erfordert nur eine Stromleitung und ein verdrilltes Signalkabel. Der Rest wird intern verlegt.
- Greifen, Haken und festes Halten
- Feinsteuerung kleiner Teile
- Nahtlose ROS 2-Integration für schnelle Einrichtung

SCHUNK SVH anthropomorphe Fünf-Finger-Hand:Vollwertige Roboterhand mit 20 Freiheitsgraden und neun integrierten Motoren – für geschickte, menschenähnliche Manipulationen bei komplexen Greifaufgaben in der Servicerobotik. Bildquelle: schunk.com
Hardware-Plattform
Die Qualcomm Dragonwing™ IQ9-Plattform bietet die für die Robotik erforderliche Leistung und Effizienz. Mit einer hybriden Architektur aus CPU, GPU und einer 100 TOPS NPU bewältigt sie komplexe KI-Aufgaben wie 4K-Videoverarbeitung, Echtzeitnavigation und maschinelle Wahrnehmung.
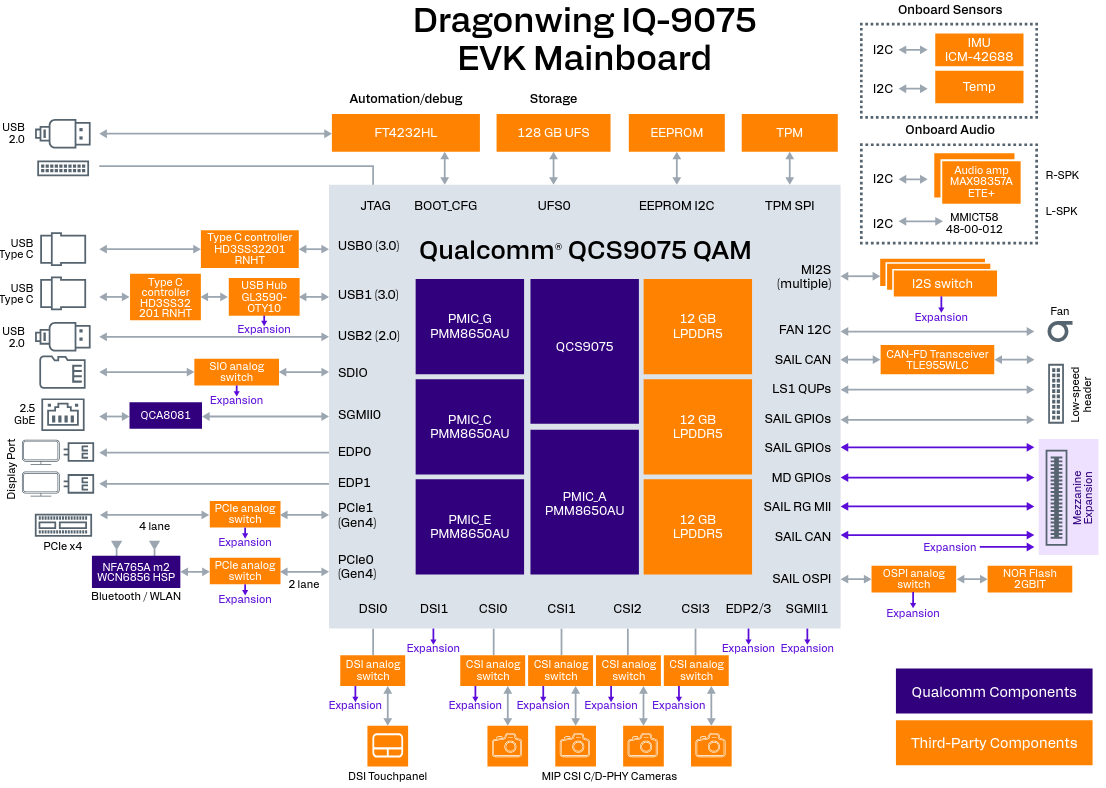
Blockdiagramm des Qualcomm Dragonwing IQ‑9075 EVK:Hochleistungsfähige Embedded-Computing-Plattform mit QCS9075 SoC, 12 GB LPDDR5-Speicher und mehreren Hochgeschwindigkeits-I/O-Schnittstellen – ideal für Edge-KI- und Robotikanwendungen. Bildquelle: qualcomm.com
Wir verwenden eine modifizierte IQ-9100-Version mit derselben Funktionalität wie der IQ-9075, zusätzlich mit Sicherheitsfunktionen – TrustZone, DRM, Krypto-Beschleuniger. Der IQ-9100 wird über seinen Ethernet-Port mit einem Beckhoff CU1128 verbunden und fungiert als EtherCAT-Master. Dieses Layout gewährleistet eine verteilte und dennoch synchronisierte Motorsteuerung. Die Fehlertoleranz wird durch die Isolierung von Motorgruppen erreicht.
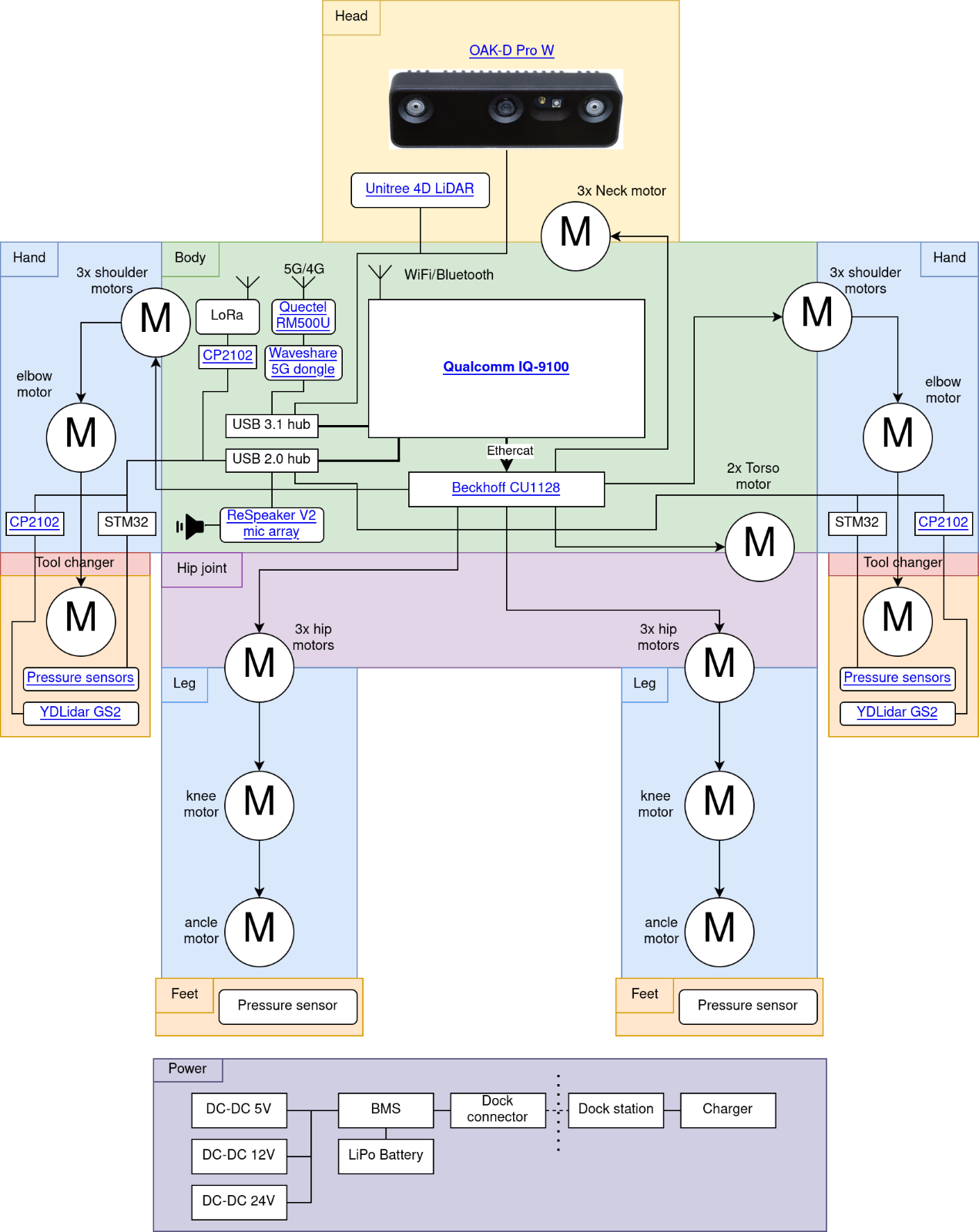
Blockdiagramm der Hardware-Architektur: The central computing unit of the system is the Qualcomm Dragonwing™ IQ-9100 Dev Kit, which integrates all key components for control, perception, and communication in the humanoid robotDie zentrale Recheneinheit des Systems ist das Qualcomm Dragonwing™ IQ-9100 Dev Kit, das alle wichtigen Komponenten für die Steuerung, Wahrnehmung und Kommunikation des humanoiden Roboters integriert.
Konnektivität und Sensoren
Der Roboter unterstützt:
- WLAN für den grundlegenden Einsatz in Innenräumen
- 5G/4G über RM500U-Modem (M.2 PCIe)
- Bluetooth für Peripheriegeräte
- LoRa für Fallback-Kommunikation mit geringer Bandbreite
Die Sensorausstattung umfasst:
- Luxonis OAK-D Pro W: 4K-Kamera mit Tiefenerfassung + IMU für visuelle Trägheitsnavigation
- Unitree 4D LiDAR: Abdeckung des toten Winkels
- YDLidar GS2: am Greifer montiert, um die Position und Größe von Objekten zu erkennen
- ReSpeaker V2: Mikrofonarray zur Lokalisierung von Sprachquellen und zur Sprachisolierung
Energieverwaltung
Der Roboter wird von einer 1-kWh-10S-Batterie mit UART-BMS mit Strom versorgt. Laufzeit: 1,5 Stunden bei Volllast, bis zu 3 Stunden im realen Einsatz. Ladezeit: 4,2 Stunden.
Software-Stack: Isaac Sim + GR00T
Für die Simulation, das Training und die Echtzeitsteuerung haben wir uns für NVIDIA Isaac Lab und GR00T entschieden.

Isaac Lab in Omniverse Digital Twin:Simulation des Verhaltens großformatiger humanoider Roboter in komplexen Umgebungen mit NVIDIA Isaac Lab – für robustes Training, Validierung und Bewegungsplanung vor dem Einsatz in der Praxis. Bildquelle: nvidia.com
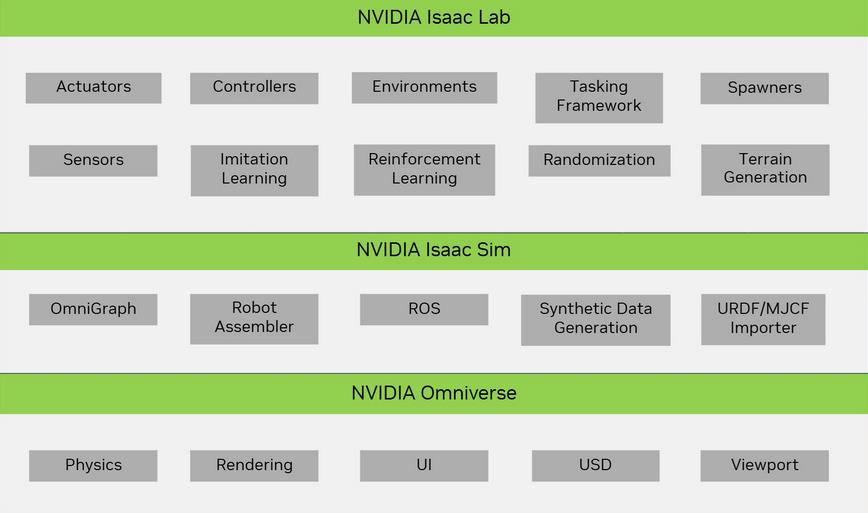
Übersicht über den NVIDIA Isaac-Software-Stack:Mehrschichtige Architektur, die Isaac Lab, Isaac Sim und Omniverse kombiniert und die End-to-End-Entwicklung von Robotersystemen durch Simulation, Training, synthetische Daten und Echtzeitvisualisierung ermöglicht. Bildquelle: nvidia.com
GR00T umfasst:
- Teleop: Telepräsenz für Demo-Aufzeichnungen
- Mimic: Generierung synthetischer Bewegungen
- Dexterity: End-to-End-Greiffähigkeiten
- Mobility: Anpassung des Roboters an unbekannte Umgebungen
- Control: einheitlicher Stack für die Körpersteuerung
- Perception: VLM + LLM + Speicher für kognitive Flexibilität
Das Flaggschiffmodell GR00T N1 B2 (2,19 Milliarden Parameter) unterstützt multimodale Interaktion. Die Edge-KI-Leistung von 100 TOPS des IQ-9100 ermöglicht Echtzeit-Inferenz ohne Cloud-Abhängigkeit. Ein 512-Token-Vorwärtsdurchlauf wird auf unter 100 ms geschätzt – schnell genug für Echtzeit-Sprach- und Bewegungsanwendungen.
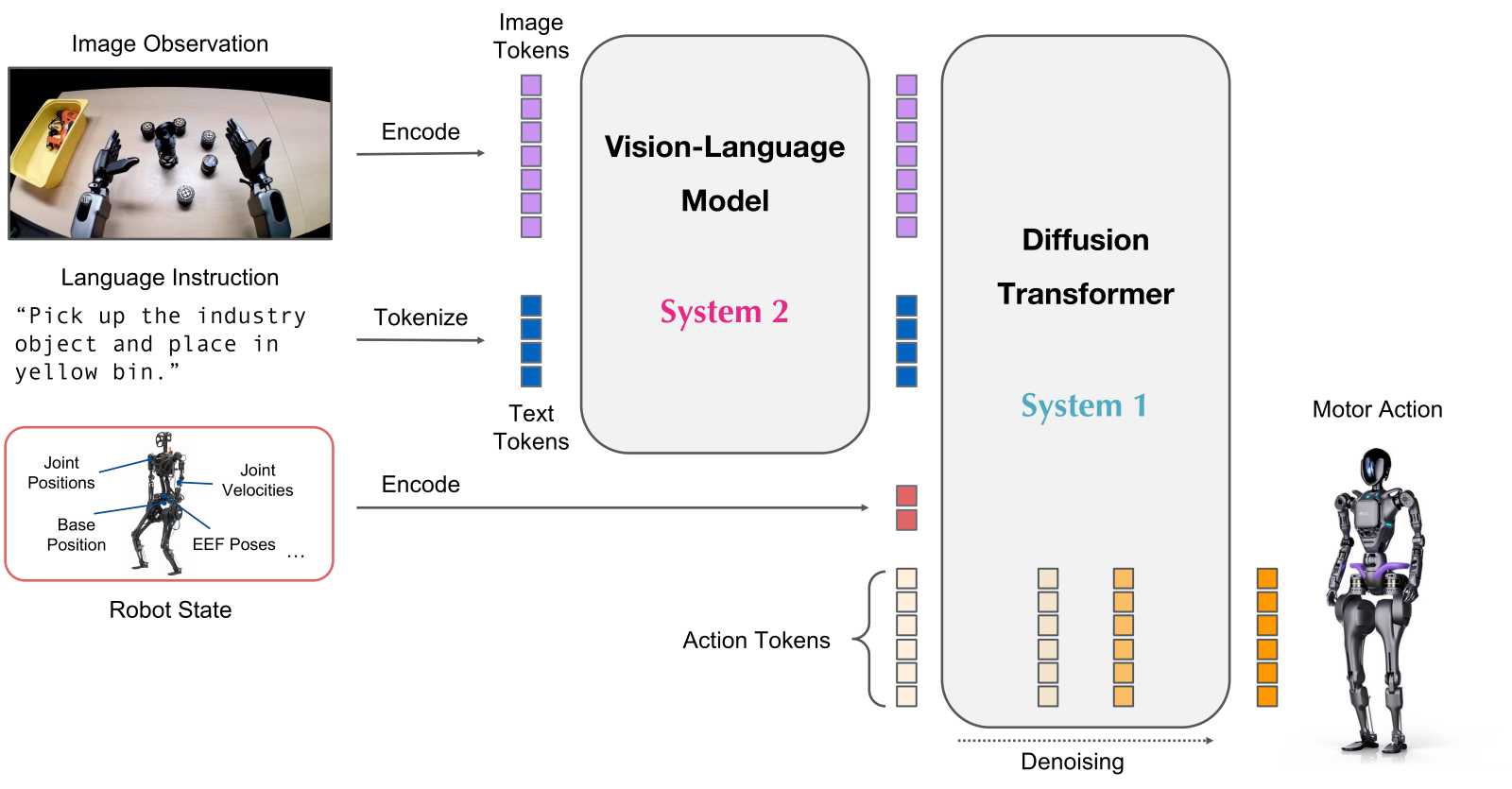
GR00T-Netzwerkarchitektur:Multimodale Modellpipeline, die visuelles Sprachverständnis und Aktionsgenerierung durch einen Diffusionstransformator kombiniert – ermöglicht humanoiden Robotern die Interpretation von Anweisungen und die Ausführung komplexer motorischer Aufgaben. Bildquelle: Gr00t GitHub
Geschäftlicher Nutzen
Mit diesem Robotik-Kit können Kunden schneller in den Markt für Serviceroboter einsteigen. Die sofort einsatzbereite Plattform verkürzt die Entwicklungszyklen und ermöglicht Anpassungen für verschiedene Branchen wie Gastgewerbe, Gesundheitswesen und Logistik.
Mit integrierter Navigation, Objektinteraktion und menschlicher Wahrnehmung ist unsere Plattform ideal für autonome Serviceaufgaben in dynamischen Umgebungen.
Wenn Sie eine Robotiklösung entwickeln und Ihre Markteinführungszeit verkürzen möchten, wenden Sie sich an Promwad, um Möglichkeiten für eine Zusammenarbeit zu erkunden.
Unsere Fallstudien im Bereich Robotik




