



Universal Nvidia Robotics Platform with Industrial Networking Support
Projekt in Kürze: Promwad initiierte die Entwicklung der ersten universellen Plattform für Robotik auf Basis von Nvidia Jetson / Orin mit Unterstützung gängiger Protokolle für industrielle Netzwerke wie EtherCAT, PROFINET und EtherNet/IP.
Mit dieser Plattform, die auf dem Hilscher netX Kommunikationscontroller basiert, können Hersteller beliebte Module und fertige Servoantriebe mit allen Arten von industriellen und konsumtiven Robotern ohne zusätzliche Lösungen verwenden.
Herausforderung

Delta-Roboter FlexPicker von ABB. Eine ähnliche kundenspezifische Lösung kann auf der von Promwad geschaffenen universellen Plattform aufgebaut werden. Quelle: Marc Auledas, Wikipedia, CC BY-SA 4.0
Lösung
Nvidia Jetson Nano & Isaac ROS
Die Nvidia-Roboterplattform ist darauf ausgelegt, beschleunigtes Rechnen für das Robot Operating System 2 (ROS 2) zu nutzen. Ihre Zuverlässigkeit wird durch die Validierung durch Open Navigation untermauert, die eine nahtlose Integration mit Navigation Stack 2 (Nav2) gewährleistet.
Jetson Nano Developer Kit, das wir zur Gestaltung der universellen Robotikplattform verwendet haben. Quelle: nvidia.com
Teleoperation, Umgebungsabbildung und Navigationsfunktionen werden durch Nvidias Isaac Robot Operating System (ROS) bereitgestellt. Mit diesen Fähigkeiten navigieren Roboter mit Agilität und Präzision durch die Umgebungen.
Unsere Lösung kann gleichzeitig Daten von mehreren Kameras mit einer Verzögerung von 100 Mikrosekunden von einem einzigen Hardware-Trigger erfassen. Mit einer Aufzeichnungsrate von bis zu 4 GB pro Sekunde können ROSbags Sensordaten schnell und zuverlässig erfassen.
Hilscher netX Netzwerkcontroller

Der netX Netzwerkcontroller mit allen industriellen Kommunikationsprotokollen, die wir in unsere Nvidia-Roboterplattform integriert haben. Bild von Hilscher
Die Hilscher netX Technologie ermöglicht die Umsetzung aller Echtzeit-Ethernet-Protokolle mit einer einzigen Hardware-Lösung, mit der Flexibilität, die Kommunikationsprotokolle durch das Laden unterschiedlicher Firmware zu wechseln und so eine Anpassungsfähigkeit an sich verändernde Bedürfnisse sicherzustellen.
Erweitert durch Unterstützung industrieller Netzwerke, zusätzlichen NVRAM oder SRAM und einem erweiterten Temperaturbereich bietet unsere Plattform eine Vielzahl von Hardwareoptionen, die eine optimale Leistung für verschiedene Robotikanwendungen gewährleisten.
Wie die Plattform funktioniert
Der Protokoll-Stack arbeitet unabhängig auf der Hilscher-Plattform und ermöglicht einen nahtlosen Datenaustausch mit dem Host über Dual-Port-Speicher oder DMA. Dank der einheitlichen Hilscher-Plattformstrategie nutzt unsere Plattform konsistente Treiber und Tools über die Protokolle hinweg und gewährleistet so ihre Flexibilität und Anpassungsfähigkeit.
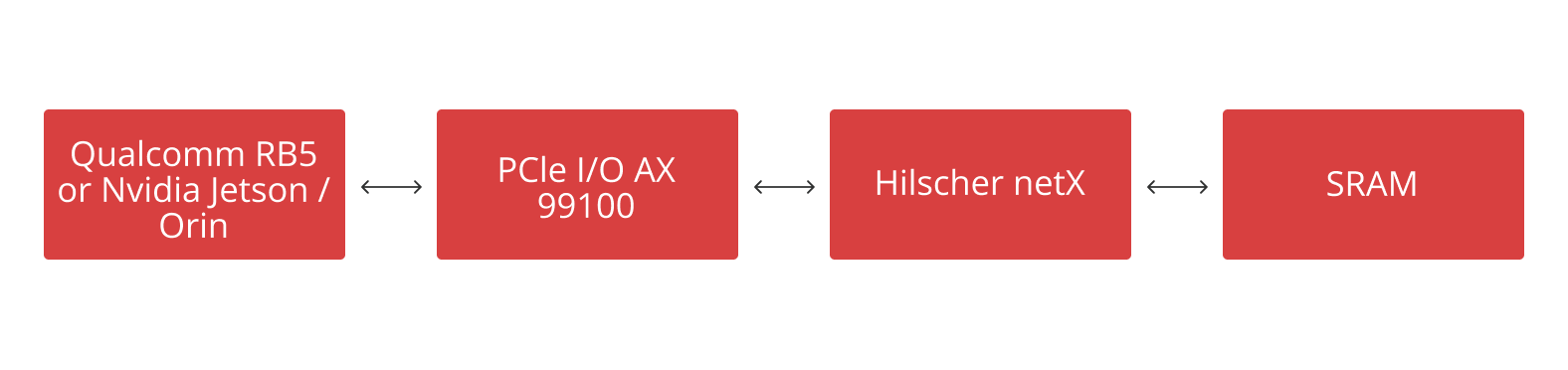
Blockdiagramm der universellen Plattform für Robotik von Promwad, ausgestattet mit ROS, Nvidia Jetson Nano und Hilscher netX
Der Datenaustausch mit Nvidia Jetson/Orin erfolgt über PCIe-Konnektivität, ermöglicht durch die AX99100 PCIe-Bridge auf dem Hilscher-Teil der Plattform.
Die Trägerplatine bietet eine Reihe von Funktionen:
- Eine einheitliche Benutzeroberfläche über alle Protokolle hinweg;
- Unterstützung für universelles Echtzeit-Ethernet als Master oder Slave;
- Vereinfachte Integration über eine Vielzahl von Treibern;
- Flexibler Datenzugriff über Dual-Port-Speicher oder Direktzugriffsspeicher (DMA);
- Eine einfache Konfiguration wird durch die Zuweisung einer eindeutigen Steckplatznummer mit einem Drehschalter bereitgestellt.
Unsere Lösung empfängt Daten aus der Umgebung mit FPD Link III Kameras und LiDARs.
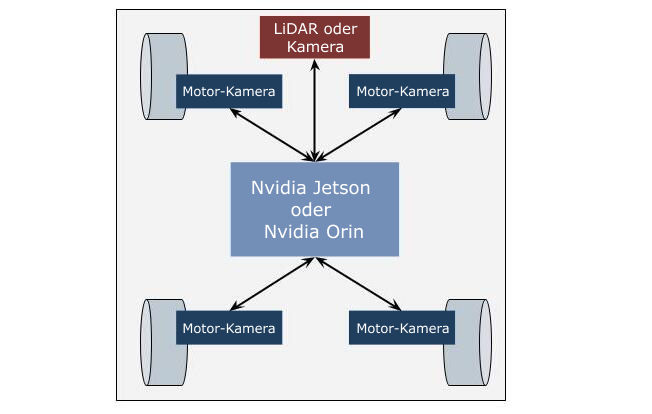
Blockdiagramm eines mobilen Roboters mit Nvidia Jetson / Orin
Wir testen die Lösung derzeit auf einer mobilen Plattform. In diesem Setup ist jeder Motorantrieb nahtlos über EtherCAT und PROFINET mit der Hauptplatine verbunden. Unser primäres Betriebsprotokoll ist CiA 402, und wir evaluieren auch die Effektivität dieser Lösung mit dem PROFIdrive-Profil.

Ein mobiler Roboter für Gewächshäuser landwirtschaftlicher Komplexe, der auf der von Promwad entworfenen Plattform basieren und mit Roboter-Programmiersoftware angepasst werden kann
RROS für Echtzeitaufgabenverarbeitung
Um die Effizienz zu optimieren, haben wir die Plattform in zwei Bereiche unterteilt, basierend auf den zu erledigenden Aufgaben: Echtzeitaufgaben und solche mit weniger strengen Echtzeitanforderungen. Für Echtzeitaufgaben haben wir das Rust-Echtzeitbetriebssystem (RROS) implementiert, ein Dual-Core-Betriebssystem, das den Rust-Echtzeitkernel mit einem allgemeinen Linux-Kernel kombiniert.

Die RROS-Architektur. Quelle: bupt-os.github.io
Hier sind die Vorteile, die die Plattform durch RROS erhält:
- Echte Echtzeitfähigkeit: RROS hat eine bessere Echtzeitleistung als RT-Linux. Dieses Betriebssystem enthält einen fortschrittlichen Aufgabenplaner, der schnell auf externe Ereignisse reagiert und Aufgabenwechsel und Verarbeitungslatenzen reduziert.
- Kompatibilität: RROS integriert sich nahtlos in nahezu jedes Linux-Programm und erleichtert den reibungslosen Übergang komplexer Anwendungen wie TensorFlow und Kubernetes. Darüber hinaus bietet es eine mühelose Anpassung herkömmlicher Linux-Programme in Echtzeitäquivalente, wodurch die Vielseitigkeit und Flexibilität erhöht wird.
- Benutzerfreundlichkeit: RROS vereinfacht den Prozess der Programmierung und Fehlerbehebung von Echtzeitanwendungen. Durch die Nutzung der libevl-Schnittstelle zum Zugriff auf Echtzeit-APIs ermöglicht es die nahtlose Integration mit Debugging-Tools wie gdb, kgdb und QEMU.
- Robustheit: Der Echtzeitkernel von RROS ist in Rust geschrieben, was seine Sicherheit und Robustheit erhöht, insbesondere bei der Bewältigung von Speicher- und Gleichzeitigkeitsproblemen.

6-Achsen-Roboter, die in der Maschinenmontage eingesetzt werden, können ebenfalls auf der von Promwad entwickelten universellen Plattform basieren
Die Plattform behält ihre leistungsstarken Fähigkeiten bei, bleibt dabei aber kompakt und leicht: Ihr Gewicht überschreitet selbst mit voller Nutzlast nicht 120 kg. Das Hauptaugenmerk bei der Sicherheit liegt auf dem möglichen Aufprall des Roboters selbst. Strenge Konstruktionsmaßnahmen mindern die Risiken und sorgen dafür, dass selbst im schlimmsten Fall eines direkten Zusammenstoßes der Schaden gering bleibt.
Geschäftswert
Durch die Nutzung unserer vielseitigen Plattform in ihren Robotiklösungen können Roboterhersteller von mehreren Vorteilen profitieren:
- Ressourceneinsparungen: Die Plattform unterstützt bereits industrielle Protokolle, wodurch der Bedarf an zusätzlichen Integrationslösungen entfällt.
- Erhöhte Systemzuverlässigkeit: Durch Interoperabilität und nahtlose Kommunikation zwischen verschiedenen Komponenten von Robotersystemen.
- Vielseitigkeit: Die Plattform ermöglicht die Erstellung einer Vielzahl von Robotersystemen auf Basis einer einzigen Lösung, was den Entwicklungsprozess vereinfacht.
Kooperationsmöglichkeiten
Nehmen Sie Kontakt mit uns auf, und wir stellen Ihnen umfassende Informationen zu drei möglichen Wegen der Zusammenarbeit zur Verfügung:
- Anpassung der Plattform an Ihre Anforderungen: Wir passen die Plattform an Ihre spezifische Robotiklösung an und richten uns nach den Bedürfnissen Ihrer Branche.
- Anmeldung auf der Warteliste für kommende Veröffentlichungen: Sichern Sie sich einen Platz unter den Ersten, die unsere Plattform nutzen. Da die Entwicklung bis 2025 abgeschlossen sein soll, erhalten Sie vollständige Informationen zu Preisen und Veröffentlichungsterminen, sobald diese verfügbar sind.
- Investition in die Plattformentwicklung und Partnerschaft mit uns, um diese bahnbrechende Plattform auf den Markt zu bringen.
Mehr von dem, was wir für die Robotik tun
- Robotik-Design-Dienstleistungen: Entdecken Sie unser Robotik-Engineering-Profil, das eine vollständige Palette von Dienstleistungen zur Gestaltung und Herstellung Ihres maßgeschneiderten Roboters abdeckt.
- NVIDIA für Robotik: Erfahren Sie mehr über unsere Erfahrung mit Nvidia-Plattformen, den beliebtesten eingebetteten Lösungen für KI-gesteuerte Roboter.
- Work&Fun Interaktives System: Wir haben ein System mit einer Reihe einzigartiger eingebauter Anwendungen, einem interaktiven Bildschirm und einem Roboter Servomotor entwickelt.
Medienberichterstattung
Diese Nachricht wurde veröffentlicht in INDUSTR.com: Kompatibilitätsproblem von Industrieroboter-Herstellern wird gelöst
Diese Nachricht wurde in Robotik und Produktion veröffentlicht : Universelle Robotikplattform



