


Von einmaligen Integrationen zu einem wiederverwendbaren Robotik-Software-Stack
Das Projekt in Kürze: Wir haben eine wiederverwendbare Softwareplattform entwickelt, die Echtzeit-Bewegungssteuerung, moderne Robotik-Software und 5G-Konnektivität auf einem einzigen eingebetteten Controller vereint. Der Stack wurde auf einem Serviceroboter validiert, ist jedoch so konzipiert, dass er auf verschiedene Industrie- und Mobilroboter übertragbar ist. Anstatt für jedes neue Projekt Treiber, Gateways und benutzerdefinierten Code zusammenzufügen, können OEMs und Integratoren auf dieser fertigen Grundlage aufbauen und sich auf ihre Produktlogik und Anwendungsfälle konzentrieren.
Herausforderung
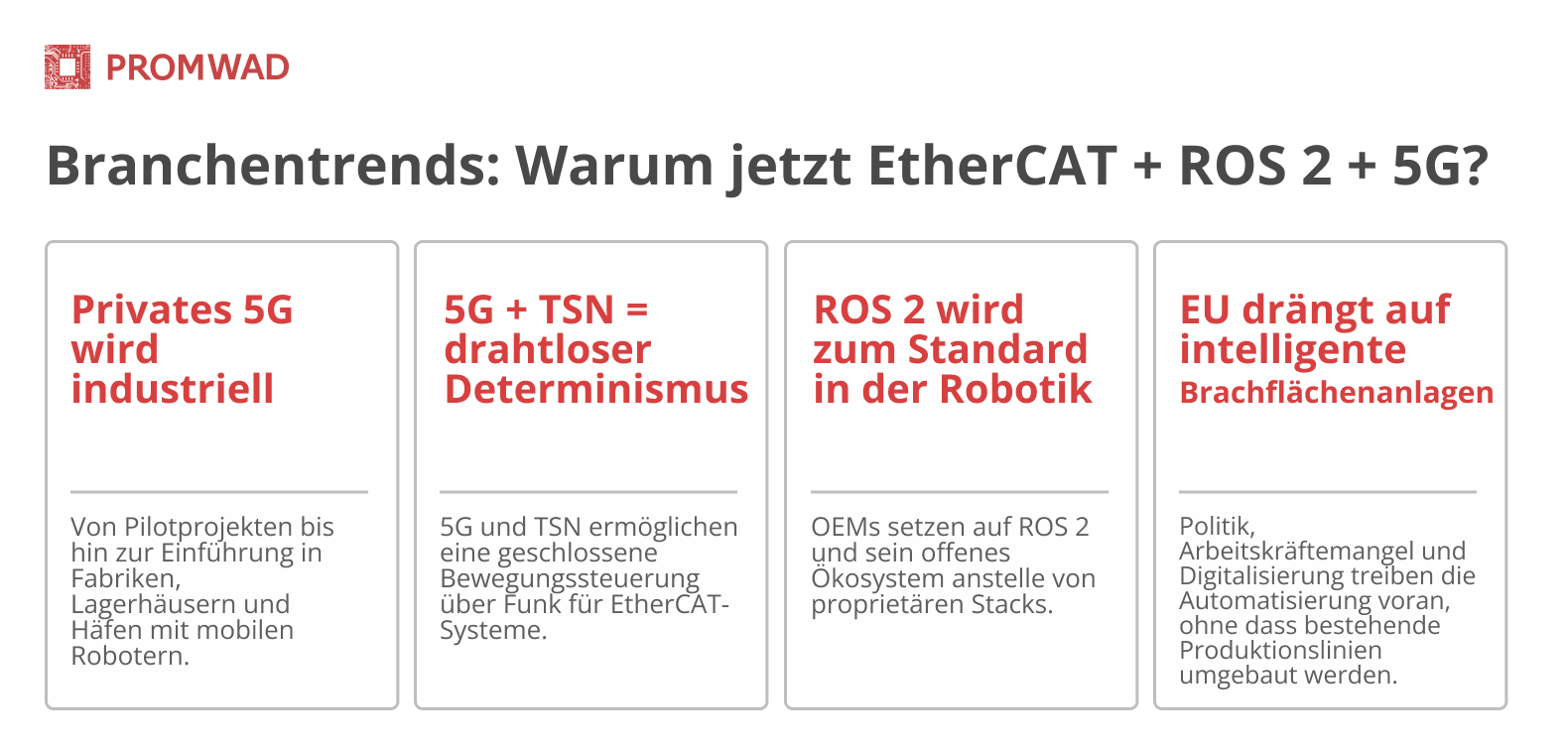
Das Projekt begann als Versuch, zu überprüfen, ob EtherCAT-Bewegungssteuerung, ROS 2-Robotiksoftware und 5G-Konnektivität als wiederverwendbarer Software-Stack zusammenarbeiten können, und nicht nur als Labordemo. In realen Implementierungen werden diese Schichten oft mit einmaligen Gateways und projektspezifischen Treibern zusammengefügt, was zu wiederkehrenden Problemen führt:
- Unzuverlässige Echtzeit-Motor- und E/A-Steuerung in nicht deterministischen Netzwerken.
- Fragmentierte Software-Stacks von verschiedenen Anbietern.
- Komplexe, schwer zu implementierende Fernsteuerung in großem Maßstab.
Infolgedessen bleiben viele Implementierungen in der Pilotphase stecken. Wir haben uns entschlossen, einen wiederverwendbaren Referenz-Stack zu erstellen, der an verschiedene Roboter und Maschinen angepasst werden kann.
Dieses Projekt entstand aus der langjährigen Arbeit von Promwad in den Bereichen eingebettete Steuerungen, industrielle Netzwerke und Robotik-Software. Durch die Zusammenführung dieser Erfahrungen in einer einzigen Plattform haben wir das gesammelte Know-how in einen wiederverwendbaren Software-Stack umgewandelt, der für moderne, vernetzte Roboter bereit ist.
Lösung
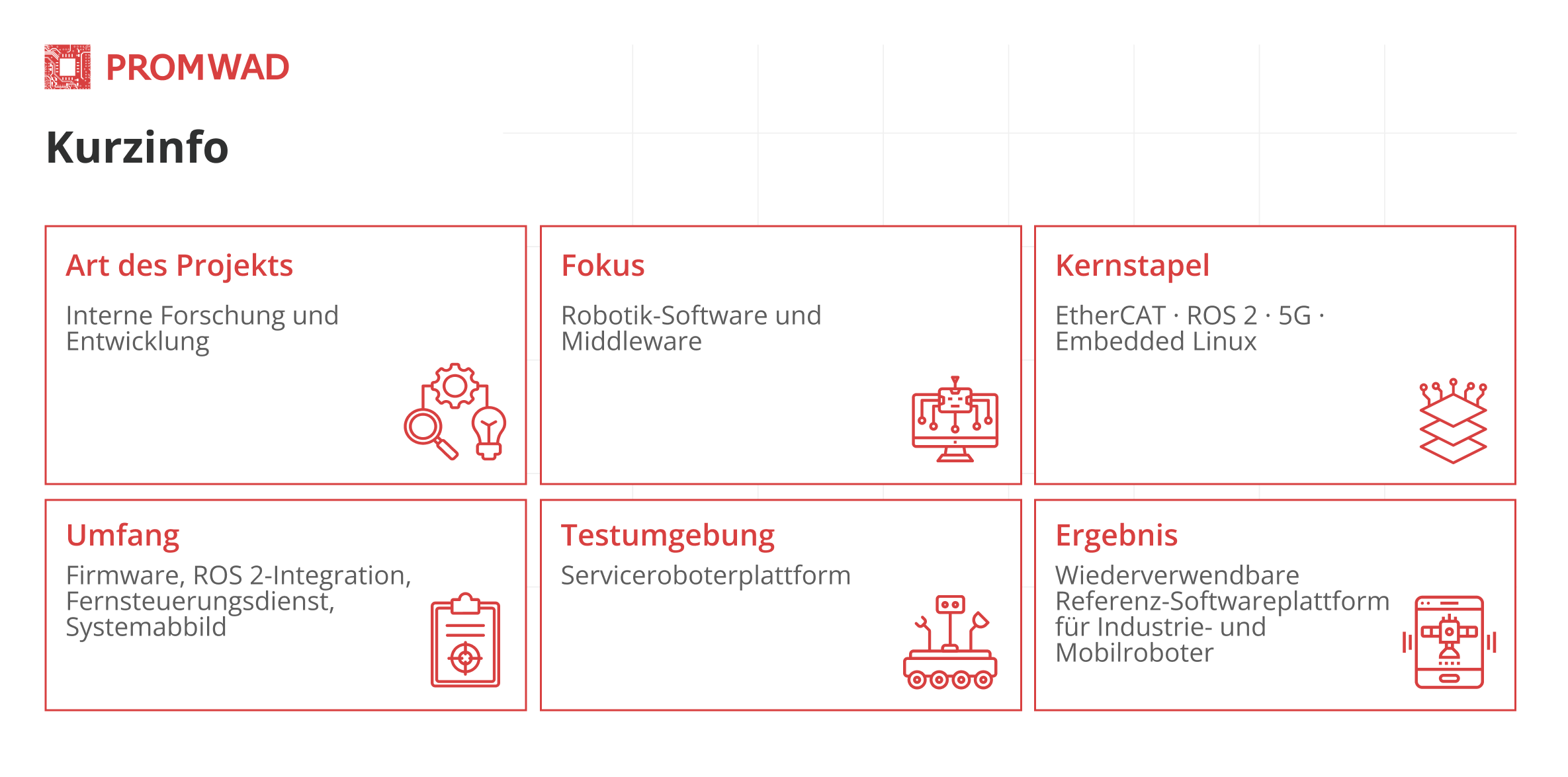
Bei diesem Projekt ging es hauptsächlich um Software und Middleware. Der physische Roboter – unsere hauseigene Plattform auf Qualcomm® RB3 – diente als praktischer Teststand, während das Hauptergebnis ein wiederverwendbarer Stack und Bibliotheken für EtherCAT, ROS 2 und 5G sind.
Motorsteuerungs-Firmware auf Hilscher netX90
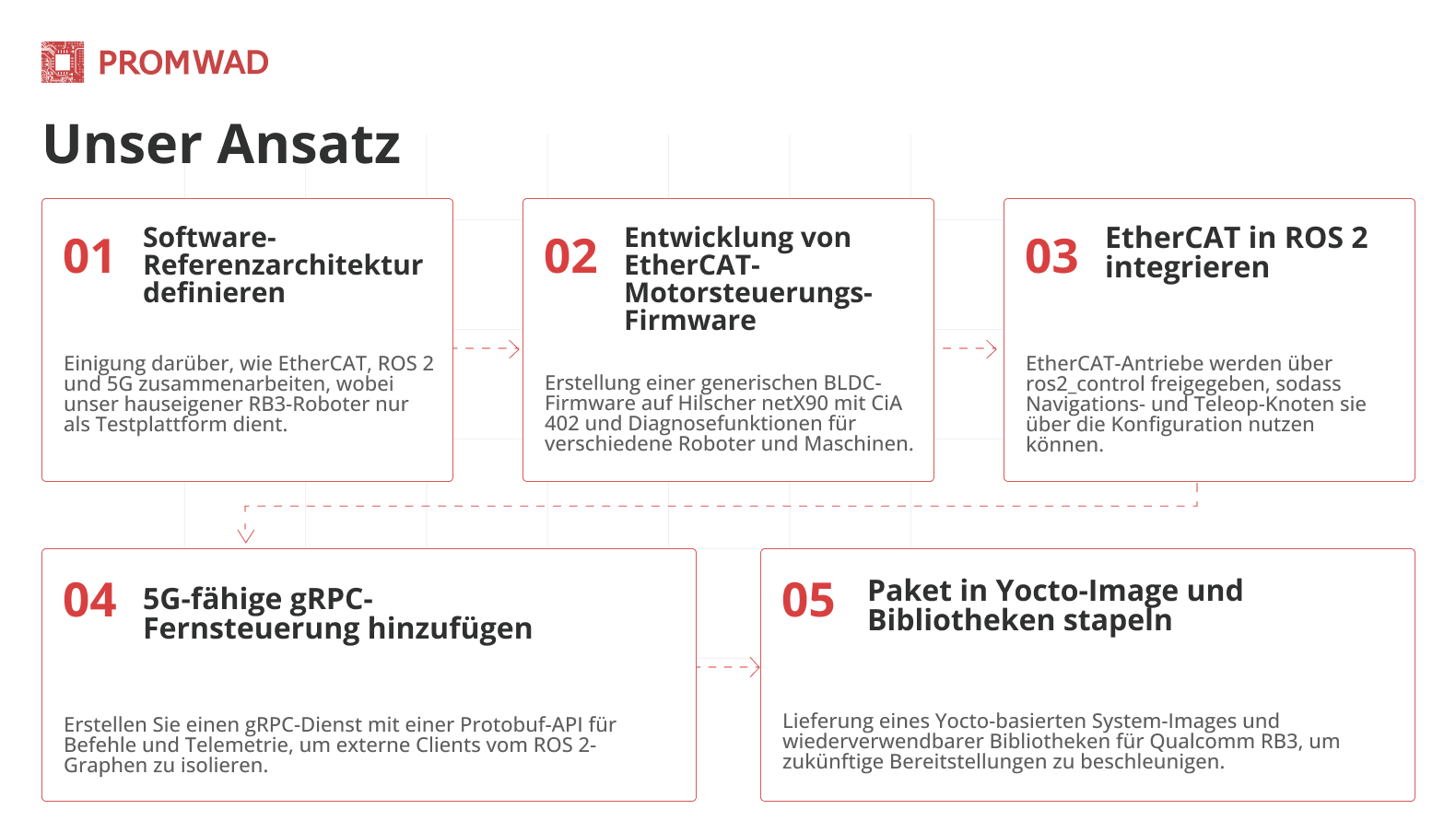
Wir haben Echtzeit-Firmware für den Hilscher netX90 EtherCAT-Controller entwickelt, einschließlich feldorientierter Regelung, CiA 402-Profilen und Unterstützung für mehrachsige BLDC-Antriebe. Die Firmware stellt Bewegungsparameter und Diagnosen über EtherCAT-Prozessdaten zur Verfügung, sodass sie nicht nur auf dieser Plattform, sondern auch auf anderen Robotern und Maschinen wiederverwendet werden kann.
EtherCAT + ROS 2-Integration auf RB3
Auf dem eingebetteten Host haben wir einen EtherCAT-Master implementiert und ihn mit ROS 2 unter Verwendung von ros2_control integriert. Geschwindigkeitsbefehle von ROS 2-Navigations- und Teleoperationsknoten werden in EtherCAT-Antriebssollwerte umgewandelt. Gleichzeitig wird das Encoder-Feedback zur Odometrie und Überwachung an ROS 2 zurückgesendet – EtherCAT-Antriebe werden zu einer herstellerneutralen ROS 2-Ressource, die konfiguriert und nicht fest codiert ist.
Fernsteuerung über 5G mit gRPC-Dienst
Um einen sicheren Fernbetrieb zu ermöglichen, haben wir zusätzlich zum ROS 2-Graphen einen gRPC-basierten Steuerungsdienst hinzugefügt. Er verwendet kompakte Protobuf-Nachrichten für Befehle und Telemetrie, übernimmt die Erkennung von Robotern und die Überwachung der Verbindungsqualität und trennt externe Clients von ROS 2 DDS, was die Sicherheit und Bereitstellung über VPNs, 5G und kabelgebundene Netzwerke vereinfacht.
Wiederverwendbares Linux-Image und Bibliotheken
Alle Komponenten sind in einem benutzerdefinierten Yocto-basierten Linux-Image und BSP-Layern für Qualcomm RB3 gepackt. Das Image enthält den EtherCAT-Stack, ROS 2-Pakete, den gRPC-Dienst, Sensortreiber und Startskripte, sodass das gesamte System autonom auf dem Controller bootet und läuft. Das Ergebnis ist ein wiederverwendbarer Software-Kern für EtherCAT-basierte Roboter: Hersteller und OEMs können ihn anpassen, indem sie die Konfiguration und die Peripherietreiber ändern, anstatt die Kernlogik neu zu schreiben. Das Projekt bestätigte einige wichtige Punkte für Teams im Bereich der Industrierobotik:

Geschäftlicher Nutzen
Wiederverwendbare Plattform, sofort einsatzbereit
Das Ergebnis ist ein kompletter Software-Stack – Bewegungsfirmware, ROS 2-Integration, eine Fernsteuerungsebene und ein reproduzierbares System-Image –, der für verschiedene Roboter wiederverwendet werden kann, anstatt von Grund auf neu erstellt werden zu müssen.
Schnellere Lieferung für OEMs und Integratoren
Teams können von einer funktionierenden Referenzplattform ausgehen, das Integrationsrisiko reduzieren und schneller vom Pilotprojekt zur Bereitstellung übergehen.
Eine solide Basis für die weitere Entwicklung
Die Architektur ist auf Weiterentwicklung ausgelegt: Sie kann mit deterministischem Networking (TSN), Sicherheitsfunktionen und Edge-KI-Modulen erweitert werden, wenn die Produktanforderungen wachsen.
Weitere Aktivitäten im Bereich Robotik
- Robotik-Engineering: Entdecken Sie unsere Dienstleistungen im Bereich der Roboterentwicklung für eine Vielzahl von Anwendungen.
- Nvidia Robotics Platform mit industriellen Protokollen: Eine Fallstudie zum Aufbau einer einzigartigen Plattform, die weit verbreitete industrielle Netzwerkprotokolle unterstützt.
- SRCI mit PROFINET: Entdecken Sie unsere Studie zur SRCI-Schnittstelle für die SPS-basierte Robotersteuerung verschiedener Hersteller.
FAQ
Welche Industriesoftware entwickeln Sie für Robotik und Automatisierung?
Wir entwickeln eingebettete Linux-Software, Firmware, Middleware und User-Space-Anwendungen für industrielle Geräte und Robotikplattformen – vom Proof of Concept bis hin zu einsatzbereiten Systemen.
Können Sie industrielle Netzwerke wie EtherCAT in Robotik-Software-Stacks integrieren?
Ja. Wir arbeiten mit industriellen Netzwerken wie EtherCAT und entwickeln Integrationsschichten, die deterministische Bewegungssteuerung mit übergeordneter Robotik-Software verbinden.
Entwickeln Sie Embedded Linux für Steuerungen und industrielle Geräte?
Wir liefern maßgeschneiderte Embedded-Linux-Distributionen, Integration auf BSP-Ebene, Treiber und Systemdienste, die auf industrielle Steuerungen und Robotik-Hardware zugeschnitten sind.
Können Sie dabei helfen, projektspezifische Integrationen durch eine wiederverwendbare Plattform zu ersetzen?
Ja. Wir entwickeln modulare, konfigurationsgesteuerte Software-Stacks, die auf verschiedene Roboter und Maschinen portiert werden können, wodurch sich die Integrationszeit und der langfristige Wartungsaufwand reduzieren lassen.
Welche Teile des Stacks können Sie durchgängig abdecken?
Von Low-Level-Firmware und Treibern bis hin zu Middleware, APIs und Anwendungsdiensten – einschließlich sicherem Fernzugriff und Integration industrieller Protokolle.























